- Published on
MD-UAV Lite – Tiltrotor VTOL UAV
- Authors
- Name
- Vinamr Arya



Introduction
MD-UAV Lite is an improved, smaller, and more reliable version of the original MD-UAV hybrid VTOL concept developed at the University of Michigan. After identifying structural and vibration challenges in the inherited full-scale MD-UAV airframe, this aircraft was created to serve as a clean-sheet test platform that preserved the mission goals—rapid deployment of medical supplies—while enabling more dependable testing, control integration, and manufacturability.
The aircraft was designed around a 2 kg payload capacity and an operational range of approximately 10 km, with the ability to perform VTOL, STOL, or conventional runway operations depending on the mission.
Project Motivation and Goals
The primary objective of MD-UAV Lite was to convert the complex and vibration-sensitive MD-UAV concept into a platform that was:
- structurally robust
- easier to tune on PX4/ArduPilot
- simpler to manufacture and repair
- small enough for rapid iteration
- capable of validating hybrid-VTOL control strategies
This lighter airframe helped isolate core VTOL performance parameters before reintegrating them into future full-scale vehicles.
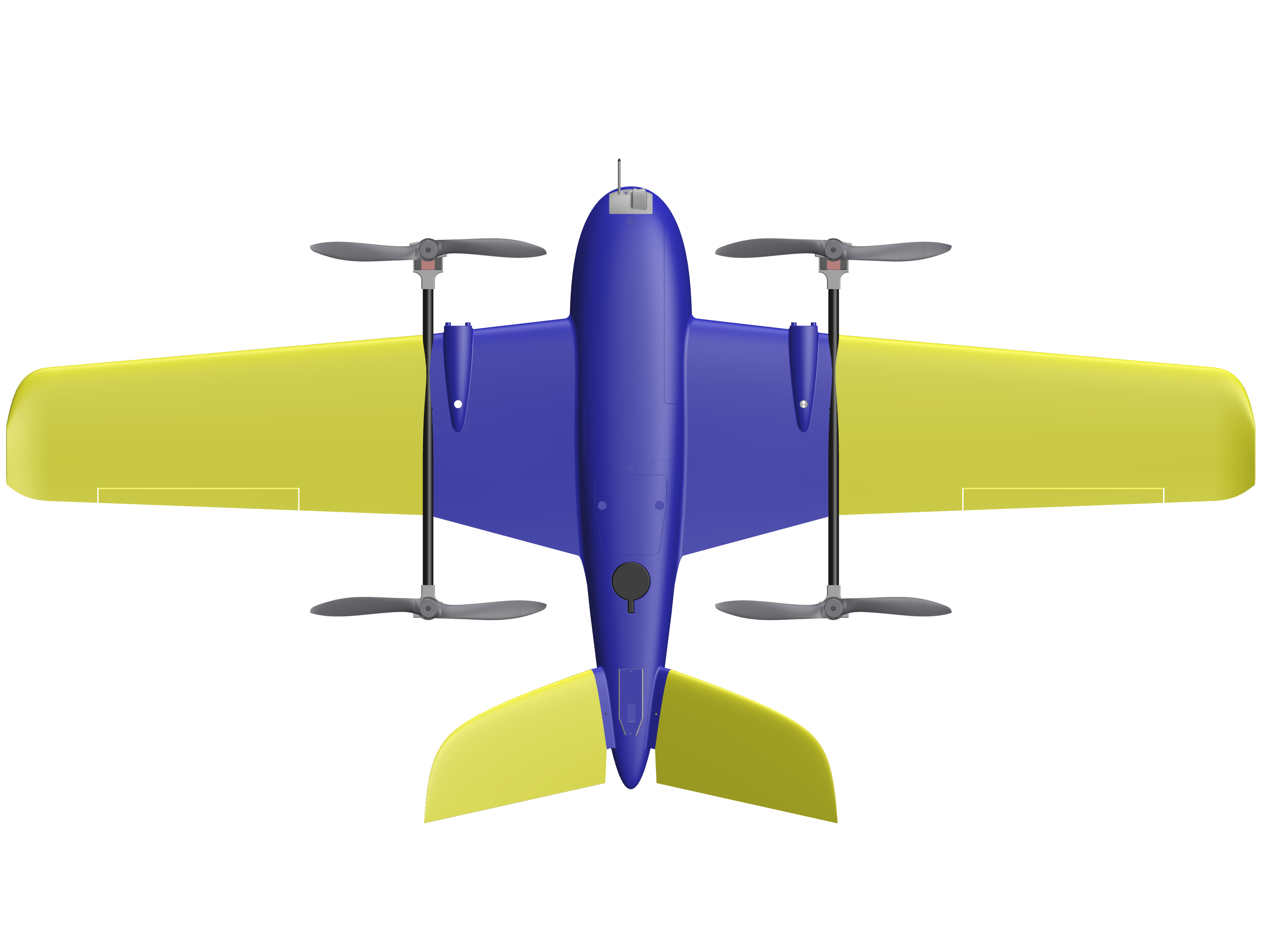
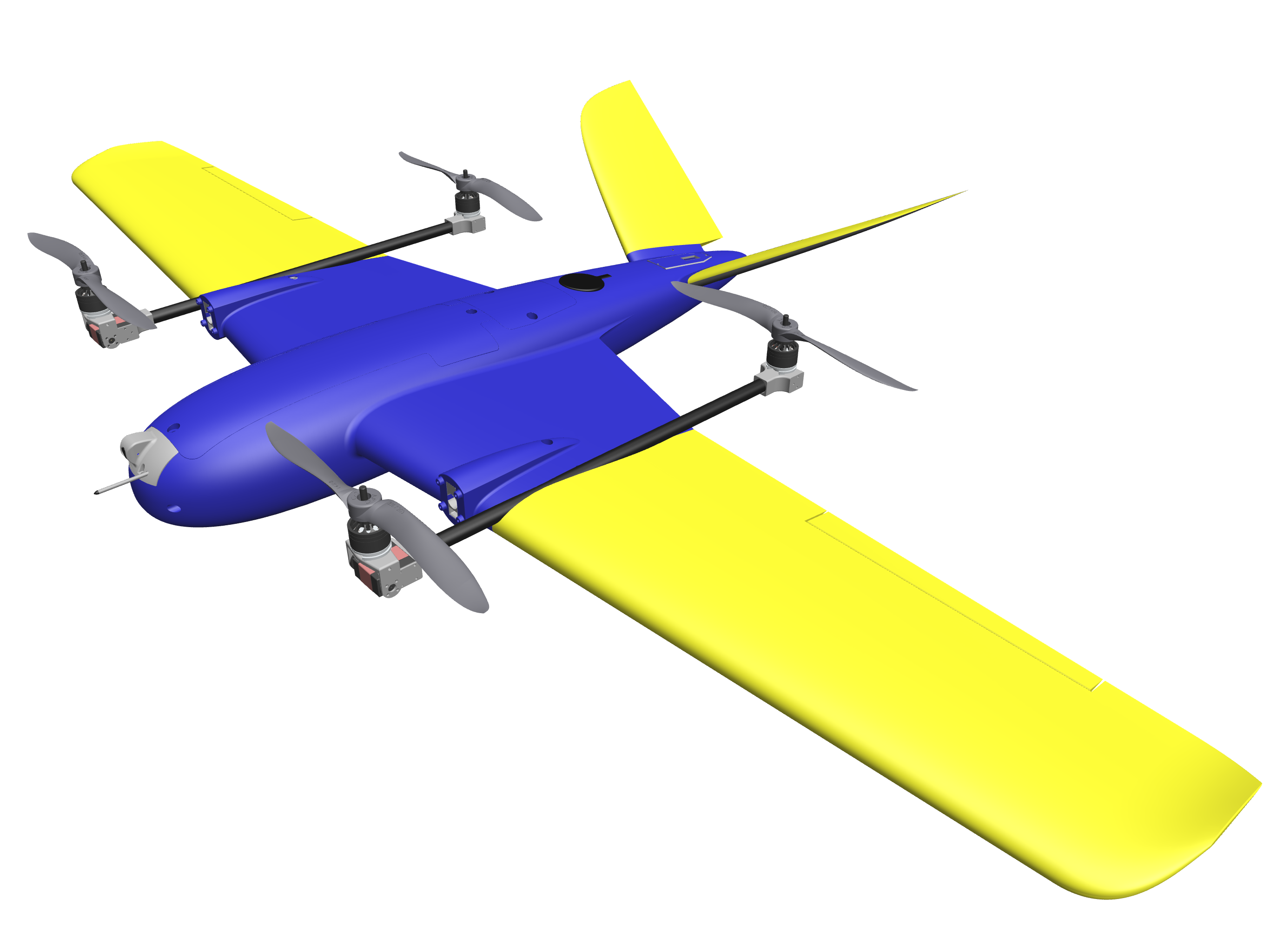
Airframe Design and Materials
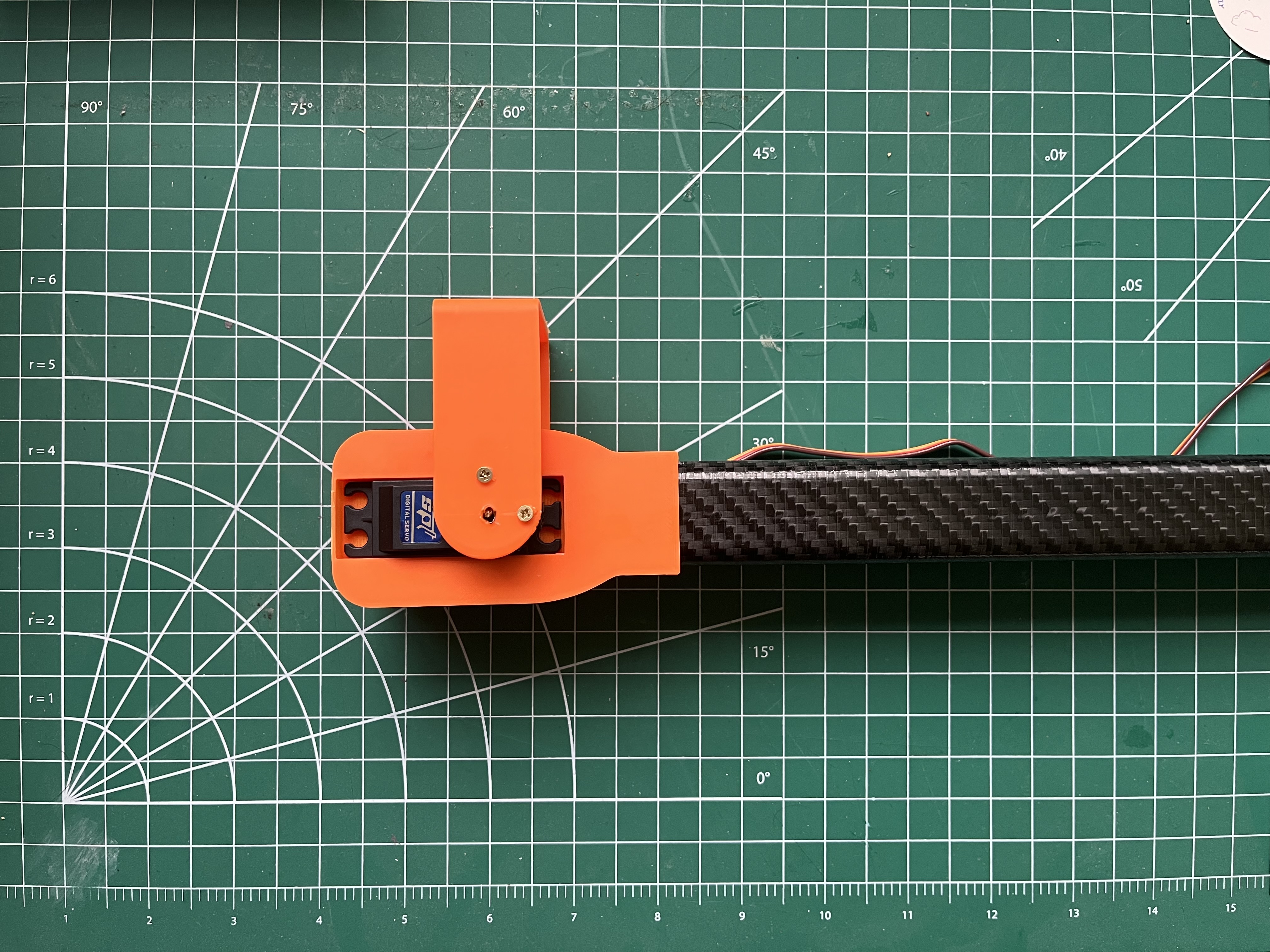
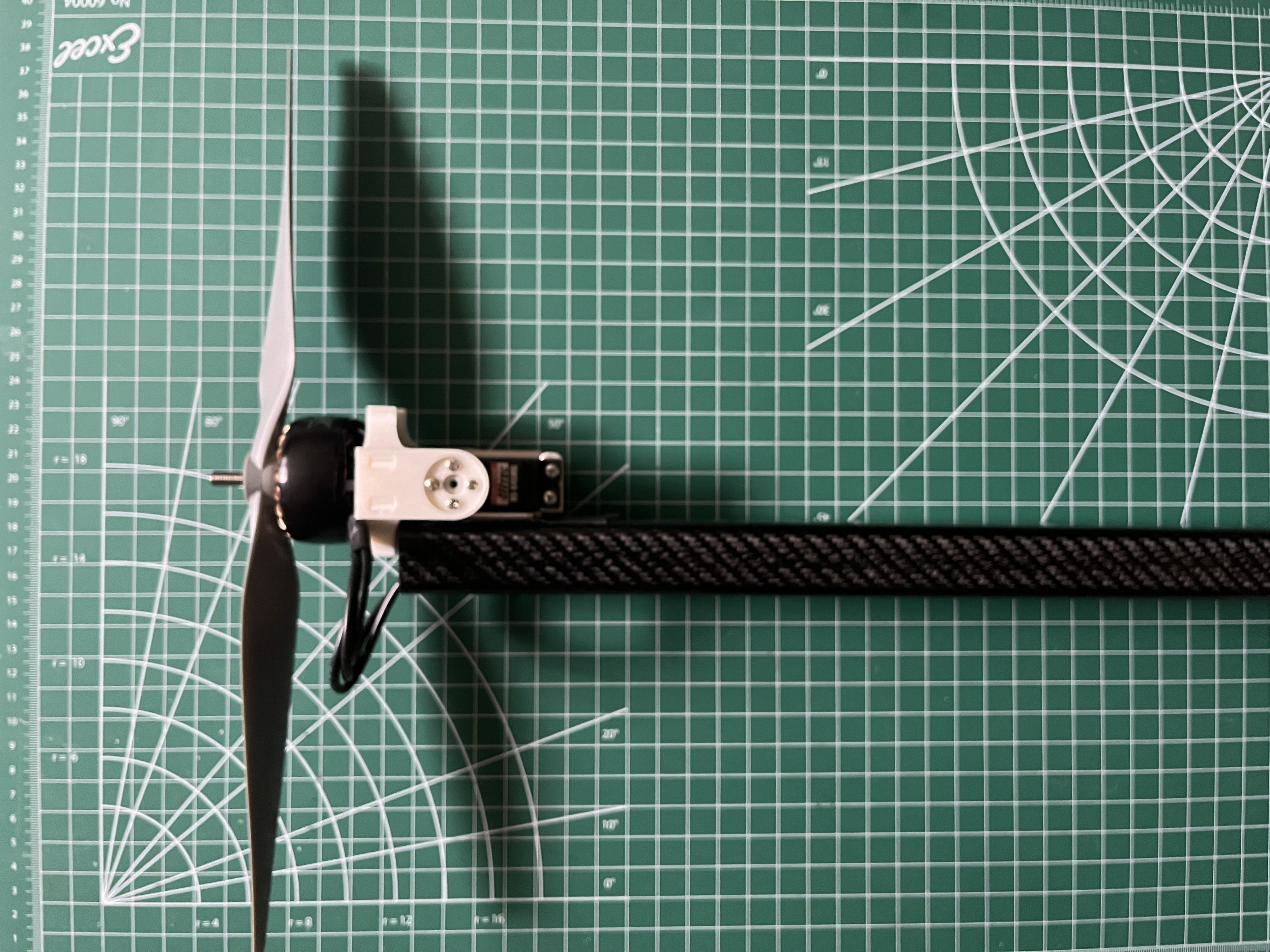
MD-UAV Lite was built using a combination of EPO foam, carbon-fiber reinforcement, and 3D-printed components for housings, mounts, and structural interfaces. This hybrid approach struck a balance between weight, cost, and structural rigidity while allowing rapid redesigns.
Key design drivers included:
- minimizing vibration for clean IMU signals
- strengthening wing and fuselage interfaces
- ensuring clean separation between VTOL rotors and control surfaces
- creating accessible internal bays for avionics and batteries
The final structure offered enough stiffness for stable VTOL hover yet remained light enough for efficient forward flight.
Structural Development and Validation
The structural design followed an iterative workflow supported by CAD modeling and Finite Element Analysis (FEA). These simulations helped size spars, reinforce high-load regions, and evaluate deflection during VTOL operations.
After simulation, physical test rigs and lightweight spars were added to verify:
- fuselage rigidity
- wing bending behavior
- structural integrity during VTOL thrust conditions
- adequate safety factor under cruise loads
This combination of virtual and physical testing ensured the aircraft performed reliably in all configurations.




Avionics and Power System Integration
MD-UAV Lite used a Pixhawk flight controller as the core of the avionics stack. The internal layout was designed to ensure:
- clean wiring routes
- separation between noisy and sensitive components
- easy access to the battery bay
- low-vibration mounting points for the flight controller
Once avionics integration was complete, individual motors and ESCs were bench-tested before full system run-ups were performed.
Flight Testing and Control Tuning
With the structure and avionics validated, MD-UAV Lite proceeded to flight testing. Tuning focused on improving responsiveness and stability in three flight regimes:
Vertical Flight (Hover)
- PID tuning for precise attitude control
- Noise filtering to ensure stable IMU readings
- Validation of thrust-to-weight ratios
Forward Flight
- tuning of pitch/roll authority
- validating airspeed sensor performance
- testing efficiency at different throttle settings
Transition Between Modes
- mapping throttle and tilt-mixer behavior
- ensuring smooth handoff between control models
- incremental transition attempts to refine parameters
These tests provided practical insight into hybrid-VTOL behavior and also validated Pixhawk’s mode-switching logic for future models.




Conclusion and Future Work
MD-UAV Lite successfully demonstrated a compact, structurally robust, and controllable hybrid VTOL aircraft tailored for medical supply delivery missions. By resolving many of the issues present in the larger MD-UAV airframe, it served as a reliable stepping stone toward future hybrid designs and informed the direction of later platforms—including Kestrel Mini, which embraced a simpler, no-moving-parts philosophy.
Future work includes refining transition tuning, improving battery utilization, and completing expanded flight tests under varied environmental conditions.